Chapter 1
INTRODUCTION
WAMIT Version 7 is a radiation/diffraction panel program developed for the linear analysis of the interaction of surface waves with various types of floating and submerged structures. WAMIT Version 6.4S, which is described in a separate User Manual [29]1 , performs the extended analysis for the second-order solution in bichromatic and bidirectional waves, including sum- and difference-frequency components.
Version 7 has been developed to exploit important features of contemporary computing systems, especially in the PC environment. For systems with relatively large random-access memory (RAM) and with multiple processors (CPUs, also known as ‘cores’), Version 7 is developed to take advantage of these features with substantial reductions of the computing time in many applications. Another important development in this context is the 64-bit operating system, which is essential for data access with large RAM.
The remainder of this Chapter gives a general description of WAMIT Version 7, and changes made from earlier versions. Users of earlier versions should refer particularly to Sections 1.2-1.6, which list the changes introduced in Versions 7.0-7.5. A mark in the left margin, as on_ this line, is used throughout this User Manual to call attention to changes in Version 7.5.
WAMIT includes options to use either the traditional low-order panel method or a more versatile higher-order method based on B-splines. The description and use of WAMIT for both the low-order and higher-order methods of solution has been unified as much as possible. Most of the input and output files are ‘generic’, applicable to both methods in the same form. The principal exception is the Geometric Data File, which specifies the geometry of the body surface. To simplify the understanding and use of this User Manual, chapters are organized separately for generic information common to both methods, and for specific information which refers to either the low- or higher-order method separately.
In Chapter 2 a tutorial description is given to help users get started using WAMIT in the PC/Windows environment. The examples described in Chapter 2 are for the simplest context of a single body.
Chapter 3 defines the various quantities which can be evaluated by WAMIT, and which are contained in the output files.
Chapter 4 gives more detailed information regarding the generic input files, including the Potential Control File (POT) and Force Control File (FRC) which specify the principal non-geometric inputs for WAMIT. Also described in this Chapter are the files fnames.wam, config.wam and break.wam, which are useful to specify input filenames and various parameters or options.
Users of Version 6 should note that some changes have been made which are intended to make the input data more consistent. As a result, Version 7 may require modifications of old input files, as explained in Section 4.1. Appendix B describes the utility v6v7inp, which has been prepared to automate the conversion of old input files.
Chapter 5 describes the output files, which contain the principal data computed by the program as well as log files, error files, and auxiliary files which provide useful information regarding the geometry of the structures.
Chapter 6 describes topics which are specific to the low-order method. These include the low-order Geometric Data File (GDF), which defines the coordinates of panel vertices, the use of the source formulation to evaluate the fluid velocity and second-order mean pressure on the body surface, and the analysis of bodies with thin elements such as damping plates or strakes.
Chapter 7 describes topics which are specific to the higher-order method, including the subdivision used to represent the body surface and velocity potential on this surface, and the representation of the potential in terms of B-splines. Alternative methods for defining the body geometry are described including the use of low-order panels, the use of B-splines to provide a higher-order continuous definition, the use of explicit analytical formulae, and the use of MultiSurf geometry files.
Chapters 8-12 describe several extended features in WAMIT. These include the analysis of multiple interacting bodies (Chapter 8), the use of generalized modes of body motion which can be used to describe structural deformations, motions of hinged bodies, etc. (Chapter 9), and the use of a method to remove the effect of the irregular frequencies (Chapter 10). Chapter 11 describes the procedure for evaluating the mean drift forces and moments by integration of the momentum flux on a control surface which surrounds the body in the fluid. Chapter 12 describes additional extensions to include the dynamics of fluid in internal tanks, trimmed waterlines, radiated waves from wavemakers, interactions of bodies and wavemakers with vertical walls, applications where part or all of the body surface consists of free surfaces with oscillatory pressures, a simplified method to include or omit parts of the body surface when integrating the pressure force and moment, and the analysis of bodies in channels of finite width.
Chapter 13 describes the utility F2T (Frequency-to-Time domain) which is used to transform the linear WAMIT outputs to the corresponding time-domain impulse-response functions.
Chapter 14 describes various computational topics including temporary data storage, numbers of unknowns, and input parameters, to provide a qualitative basis for estimating the requirements for RAM and hard disk storage, and for estimating run times. Instructions are provided for using multiple processors and extended RAM to reduce run times. Section 14.7 outlines the procedure for modification and use of .dll files to describe the geometry and generalized modes. Section 14.8 lists the reserved filenames used by the program. Section 14.9 describes an alternative procedure to evaluate field pressures and velocities when the number of field points is very large.
A brief outline for the theoretical basis of WAMIT is presented in Chapter 15. Reference 26 contains a more complete review of the pertinent theory.
A list of relevant references is included after the final chapter. Appendix A includes descriptions of the standard test runs. Appendix B documents the use of the utility v6v7inp for converting Version 6 input files. Appendix C describes the use of the interface between WAMIT and the MultiSurf kernel.
1.1 WAMIT Version 7
WAMIT is a radiation/diffraction program developed for the analysis of the interaction of surface waves with offshore structures. WAMIT is based on a three-dimensional panel method, following the theory which is outlined in Chapter 15. The water depth can be infinite or finite. Either one or multiple interacting bodies can be analyzed. The bodies may be located on the free surface, submerged, or mounted on the sea bottom. A variety of options permit the dynamic analysis of bodies which are freely floating, restrained, or fixed in position. In addition to the conventional case where the bodies are rigid, and moving with six modes of rigid-body motion, WAMIT permits the analysis of ‘generalized modes’ to represent structural deflections, motions of hinged vessels, devices for wave-energy conversion, etc. Part or all of the boundary surface can be defined as a free surface with an oscillatory pressure, as in the case of an air-cushion vehicle or oscillating water column.
The flow is assumed to be ideal and time-harmonic. The free-surface condition is linearized (except in Version 6.4S where the second-order free-surface condition and body boundary conditions are imposed). We refer to this as the ‘linear’ or ‘first-order’ analysis. Mean second-order forces are included in this analysis, since they can be computed rigorously from the linear solution. The radiation and diffraction velocity potentials on the body wetted surface are determined from the solution of an integral equation obtained by using Green’s theorem with the free-surface source-potential as the Green function.
The first versions of WAMIT (up to and including Version 5) were based entirely on the low-order panel method. There the geometric form of the submerged body surface is defined by flat quadrilateral elements (low-order panels), and the solutions for the velocity potential and/or source strength are assumed constant on each panel. Starting with Version 6 WAMIT was extended to include as an alternative option a higher-order panel method based on a continuous B-spline representation for the velocity potential, and several alternative schemes for defining the geometry of the body surface. The order of the B-splines is controlled by user-specified input parameters.
The two different uses of the word order should be noted to avoid confusion. Following the usual conventions of marine hydrodynamics, first-order and second-order are always used here to refer to linearization of the boundary conditions and solution, whereas low-order and higher-order refer to the method for representation of the body surface and solution.
The following quantities can be evaluated by WAMIT:
- Hydrostatic coefficients
- Added-mass and damping coefficients for all modes
- Wave exciting forces and moments using the Haskind relations, or directly by pressure-integration from the solutions of the diffraction or scattering problems.
- Motion amplitudes and phases for a freely-floating body
- Forces restraining a body which is freely-floating in some but not all modes
- Hydrodynamic pressure and fluid velocity on the body surface
- Hydrodynamic pressure and fluid velocity in the fluid domain
- Free-surface elevation
- All components of the drift force and moment by momentum integration over a control surface
- Horizontal drift forces and mean yaw moment by momentum integration in the far-field
- All components of the drift force and moment by local pressure integration over the body surface
- Drift force and moment in bidirectional waves
Two, one or no planes of geometric symmetry may be present. Part or all of the rigid-body modes can be analyzed. The program is designed to optimize the use of the available storage and minimize the computational effort for the specified planes of symmetry and modes.
Several techniques have been developed and implemented in WAMIT to improve the accuracy and efficiency of the solution and exploit the capabilities of a wide range of contemporary computing systems, ranging from personal computers to supercomputers. Important features include the use of special algorithms for the evaluation of the free-surface wave-source potential, the option to use direct, iterative, or block-iterative solution algorithms for the complex matrix equation, and the option to use either the low-order or higher-order panel methods. Version 7 has been developed to exploit the additional features of multiple processors, 64-bit operating systems, and optimum use of available RAM. In combination these result in a fast, versatile, and robust code capable of analyzing a wide variety of offshore structures.
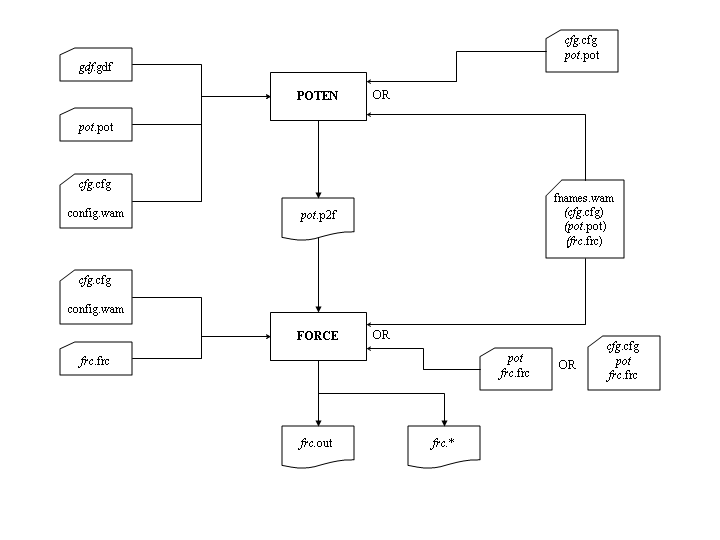
WAMIT consists of two subprograms, POTEN and FORCE, which normally are run sequentially. POTEN solves for the radiation and diffraction velocity potentials (and source strengths) on the body surface for the specified modes, frequencies and wave headings. FORCE computes global quantities including the hydrodynamic coefficients, motions, and first- and second-order forces. Velocities and pressures on the body surface are evaluated by FORCE. Additional field data may also be evaluated by FORCE, including velocities and pressures at specified positions in the fluid domain and wave elevations on the free surface. Since the principal computational burden is in POTEN, the intermediate output data from this subprogram is saved in a binary ‘P2F’ file. Thus it is possible to make multiple runs with FORCE, varying the requested parameters to be output, without re-running POTEN in each instance. (The evaluation of drift forces using a control surface is an exception where the computational burden in FORCE may be greater than that in POTEN.)
Figure 1.1 shows the architecture of the two subprograms and the principal input/output files. (For simplification this figure does not include additional input files required for the case of multiple bodies, the optional spline control file which may be used to vary B-spline parameters in the higher-order analysis, and output files which log errors, warnings, and other auxiliary data.)
The analysis for the generalized modes also requires an additional input file or special subroutine, to define the user-specified modes. Figure 9.1 in Chapter 9 shows the flow chart of POTEN for this case.
1.2 CHANGES INTRODUCED IN Version 7.0
New features which are included starting in Version 7.0 are outlined below.
- For runs where NBODY>1 global planes of symmetry can be used if the body geometry is suitable (see Section 8.5).
- When the higher-order method (ILOWHI=1) is used, patch data are output in the wamitlog.txt file if NPER=0, to assist in checking the geometry.
- Part or all of the boundary surface associated with the bodies can be defined as a free surface with oscillatory pressure distribution (see Section 12.5).
- The mean drift forces can be evaluated using control surfaces without evaluating the same forces from pressure integration (see Chapter 11).
- When the mean drift forces are evaluated from pressure integration, points where the velocity on the body surface exceeds a specified limit can be output in the file wamitlog.txt, using the parameter VMAXOPT9 in the CFG file (see Section 4.7).
- The configuration parameter TOLGAPWL can be used to adjust the tolerance for gaps between adjacent elements of the body waterline (see Section 4.7).
- The configuration parameter RAMGBMAX can be used to take maximum advantage of the computer’s available RAM for storage of temporary scratch files. Depending on the input parameters of the run and the hardware, this can be used to achieve substantial savings in run time. (See Sections 4.7 and 14.3).
- Version 7.0 is compiled with the Intel Fortran Compiler Version 12.1, using special directives to provide parallel processing on systems with multiple processors. This can result in significant reductions of run times with a single processor, and dramatic reductions with multiple processors. (See Section 14.6).
- The separate Froude-Krylov and scattering components of the exciting force and moment can be evaluated by using the extended options OPTN(2:3)=2. (See Sections 4.3 and 5.3.)
- Both configuration files config.wam and *.cfg can be used to input the configuration parameters. (See Section 4.7).
- New algorithms are used to evaluate the Rankine and log singularities in the low-order method
- The option IFORCE=2 can be used to run FORCE and POTEN in the same period loop and obtain portions of the numeric output files before the run is completed (See Section 4.14).
- The number of processors used and estimated RAM required for the run are output in the file wamitlog.txt.
- Several changes have been introduced to simplify the input files and to use a more consistent notation for the numeric output files (See Section 4.1).
- The configuration parameter IPERIO has been replaced by two parameters IPERIN, IPEROUT to control the definitions of both the input and output of the wave period array (See Section 4.7).
- The auxiliary output file .mmx has been added to output external force matrices (mass, damping, stiffness) and other quantities used for post-processing (See Section 5.6).
1.3 CHANGES INTRODUCED IN Version 7.1
New features which are included starting in Version 7.1 are outlined below.
- The configuration parameter IDELFILES can be used to skip interactive prompts and delete or overwrite old p2f files (see Section 4.7 and Section 4.9).
- The configuration parameter IOUTFNAME can be used to assign unique filenames to output files (see Section 4.7) and Section 4.9).
- The configuration parameter IOUTLOG can be used to assign the output filename to the log file wamitlog.txt (see Section 4.7) and Section 4.9).
- The configuration parameters NPFORCE and NPNOFORCE can be used to specify the set of panels or patches which are included or omitted in the integration of the hydrodynamic pressure forces (see Section 4.7) and Section 12.6).
- The configuration parameter TOLFPTWL can be used to adjust the tolerance for field points close to waterlines, and to omit field points which are inside the waterlines (see Section 4.3 and Section 4.7).
- The configuration parameter NFIELD_LARGE can be used to reduce runtimes and memory requirements if the number of field points NFIELD is very large (see Section 4.7 and Section 14.9).
- The configuration parameter ICCFSP can be used to exclude or include the external restoring coefficients due to the pressure in chambers above free-surface pressure surfaces (see Section 4.7 and Section 12.5).
- The configuration parameter IREADRAO is extended to read external RAO data in either (Modulus,Phase) or (Real,Imaginary) forms (see Section 4.7 and Section 4.13).
- The parameter NPERGROUP can be used to assign multiple groups of uniformly-spaced wave periods, frequencies or wavenumbers in the potential control file (see Section 4.2).
1.4 CHANGES INTRODUCED IN Version 7.2
New features which are included starting in Version 7.2 are outlined below.
- The parameter IOPTN(7) in the Force control file (FRC) can be assigned ±1 to use either the potential or source formulation for the mean drift force and moment when these are computed by the low-order method using the control surface option (see Section 3.8).
- The configuration parameter CHANNEL_WIDTH can be used to perform computations for bodies in a channel of finite width (see Section 12.7)).
- The configuration parameter ITRIMWL can be assigned with values greater than 1, if necessary, to improve the search for waterline intersections on trimmed bodies (See Section 12.2).
- The configuration parameters IPLTFEPOINT, IPLTNORMALand PLTDELTA can be used to change the format of the gdf_pan.dat output file for perspective plotting of the geometry, and to show the direction of the normal vector. (See Section 5.7).
1.5 CHANGES INTRODUCED IN Version 7.3
New features which are included starting in Version 7.3 are outlined below.
- The added-mass coefficients can be evaluated in the zero- and infinite-frequency limits in all cases, including bodies in channels of finite width.
- The configuration parameter IDAMPER can be used to simplify computations with damping on the free surface or on submerged dipole surfaces (see Section 12.8). Several new test runs have been added to illustrate this option (see Appendix A).
1.6 CHANGES INTRODUCED IN Version 7.4
New features which are included starting in Version 7.4 are outlined below.
- Version 7.4 uses a new subroutine to evaluate the free-surface Green function and its derivatives.
- A warning message is issued if the momentum drift force is evaluated in a channel and the parameter CHANNEL_REFLECT<1 (see Section 12.7).
1.7 CHANGES INTRODUCED IN Version 7.5
_New features which are included starting in Version 7.5 are outlined below.
- Version 7.5 uses a new subroutine to evaluate the free-surface Green function and its derivatives.
- A more efficient system for scratch file storage of the Rankine influence functions is used when there is not sufficient random access memory to evaluate the mean drift forces using option 7.
- The configuration parameter ILOG is not used. ILOG is replaced by new code which works more effectively, and makes it unnecessary for the user to assign this input parameter.
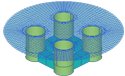
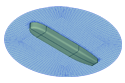
- The subroutine CYLSK_ARRAY is added to the GEOMXACT library as described in Section 7.8, to represent the geometry of arrays of cylinders with skirts. TEST26 illustrates the use of this subroutine to analyse a floating wind turbine platform (see Section A.26).